
长城汽车举办改装文化日,展示多元改装生态

来源:汽车商业评论(钱亚光)2024-07-18 20:58

近年来,汽车智能化程度快速提升,智驾应用场景逐步扩大,高阶功能向城市加速渗透。但是由于重规则、泛化差、成本高、开不好等问题,智能驾驶的普及受到限制,范围、规模有待提升。
自特斯拉提出引入“端到端”大模型发展自动驾驶后,小鹏、蔚来、理想等车企以及华为、地平线等供应商都宣布跟进部署基于端到端的智能驾驶系统。今年,端到端已成为了智驾领域的热词。
主流的自动驾驶系统分感知、规划与控制三大模块,每个模块专注于处理特定的任务。而模块间信息传递问题可能影响系统的实时响应能力,同时不同模块技术上的差异,也增加了人员培训成本和技术更新难度。
端到端模型其实是将三大模块整合在一起,通过简化系统架构,提高运行效率,以便更快地处理数据,提升系统响应速度。同时由于减少了对激光雷达和高精地图的依赖,端到端模型也降低了整体成本。
但端到端自动驾驶在实现量产落地与普及方面仍面临诸多挑战,包括技术路线的不确定性、算力和数据的需求、以及系统的安全性和可解释性问题。

7月16日,Nullmax正式推出新一代自动驾驶技术Nullmax Intelligence(简称“NI”),以更聪明、更拟人的方式应对行业自动驾驶难题。
Nullmax Intelligence不仅深度整合了Nullmax在静态感知、动态感知、时序融合方面的多项高水平研究。同时将岩芯数智全国首个非Attention机制通用大模型Yan1.2在车端进行部署,并与岩思类脑研究院合作构建类脑神经网络。
据Nullmax创始人、CEO、CTO徐雷博士介绍,NI系统是由多模态端到端大模型和安全类脑构成。
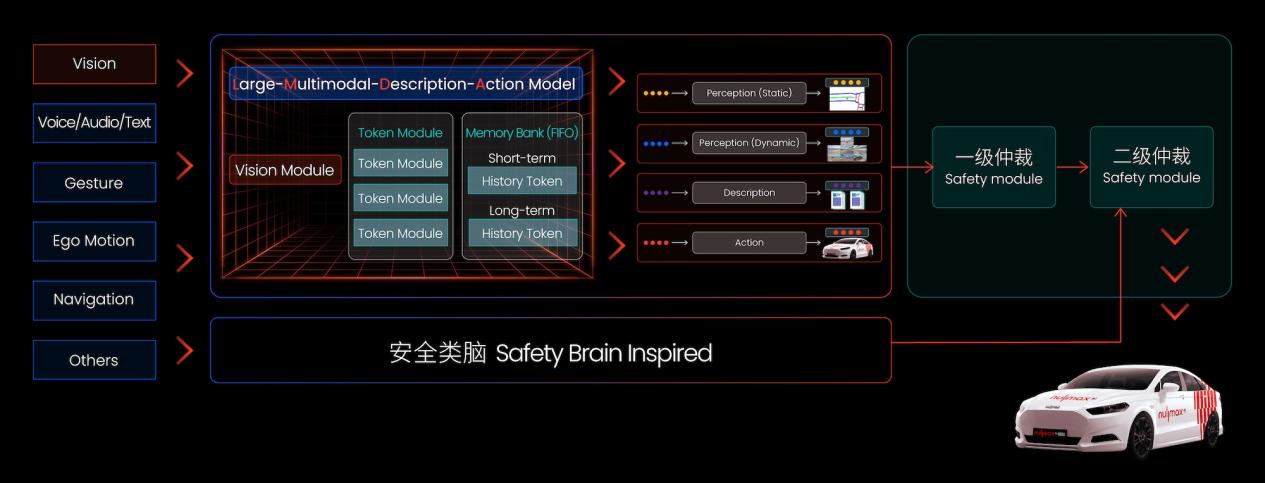
基于这个端到端的多模态大模型,参数量为十亿级别,根据导航信息输出行驶轨迹。输出的轨迹到底对还是不对,由一级仲裁和二级仲裁来决定,由此评判自车是否会与其他交通参与者发生碰撞。
一级仲裁是行业的常见手段,本质上还是依赖于多模态的端到端模型的输出。在视觉基础上,NI增加了对声音、文本、手势等信息的输入支持,通过多模态的端到端模型进行任务的推理,由系统整体输出可视化结果、场景描述和驾驶行为。
在此基础上,Nullmax引入二级仲裁——安全类脑。
安全类脑是一个参数十万量级的神经网络,规模对应斑马鱼的神经元数,是脑科学与自动驾驶结合。安全类脑并不是人设计的,而是通过实验的方法去破解斑马鱼的大脑,观测神经元活动和鱼运动之间的关系,去研究它们的神经元用什么权重去连接等,再对其行为进行模仿,保证车辆不跟其他交通参与者碰上。
这种独特的架构设计,使得Nullmax Intelligence既可以像人类一样,根据接收的图像、声音、文字等各种信息进行思考,同时也具有“趋利避害”的生物本能,能够根据环境情况作出反应,从而实现更高程度的安全、智能、自由。
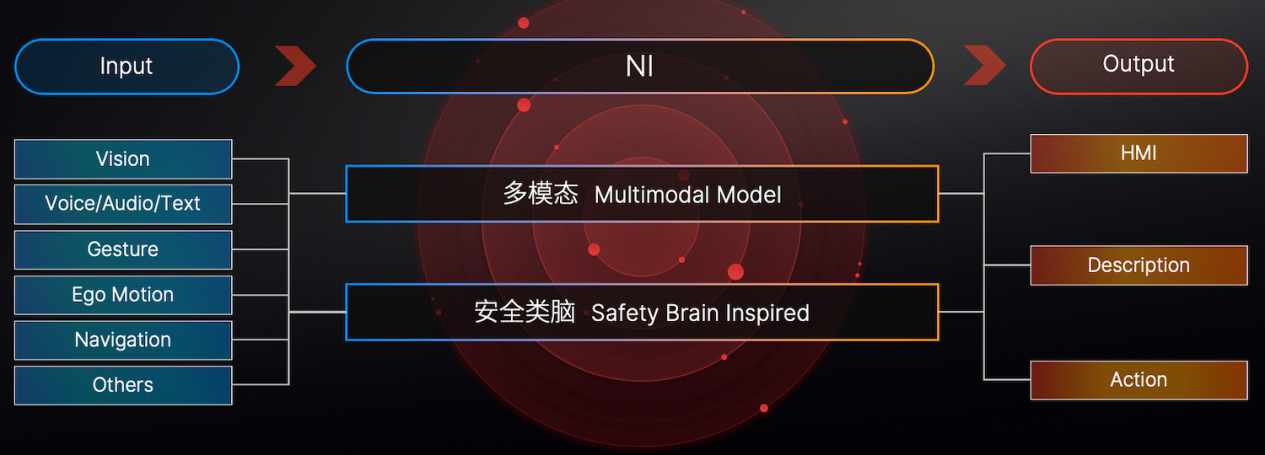
Nullmax表示,NI的最大特点在于支持纯视觉、真无图、多模态的全场景自动驾驶应用。
在不依赖激光雷达、双目相机的情况下,Nullmax可以通过纯视觉进行精准障碍物检测和三维重建,并通过实时生成局部地图结合基础导航,实现不依赖高精地图、轻地图、低精地图、众包地图的真无图应用。
多模态以视觉为核心,可以输出包含静态感知、动态感知、场景描述和驾驶行为在内的多种信息。
这一系列的特点使得Nullmax的方案具有出色的泛化能力,支持全场景应用,并且算力需求更低,小于100TOPS的稀疏算力即可实现全场景的领航辅助驾驶。更低的传感器成本和芯片成本,也令Nullmax的方案具有突出的性价比优势,更加适合普及应用。
徐雷指出,Nullmax研发纯视觉方案,是希望将来即使是低价位的车型,也能够拥有城市智驾的能力。他表示:“我们希望这套纯视觉系统能够具备这种能力,视觉是must to have,但激光是nice to have。所以,我觉得增加算力也好,增加传感器也好,都是为了把车开的更好。我们的方案靠视觉就能开,但我们并没有排斥它们。”

此外,为支持Nullmax Intelligence模型壮大和应用拓展,Nullmax还构建了数据平台和算法平台。在真实数据基础上,Nullmax通过AIGC方式生成虚拟数据,加速模型开发与迭代,尤其是稀缺的高价值数据。目前,Nullmax已经实现了生成元素、图片及视频。
通过对多模态输入Token化、多模态模型推理和自动驾驶功能集成这三个环节进行抽象,以及自研中间件MaxOS的平台调度,Nullmax的算法平台可以支持多种车型,适配不同数量传感器,且易于部署。
徐雷表示:“我们希望能打造一个AI的大脑,可以用到不同形态的物理的机器人。我们认为无论是Nullmax intelligence还是基石架构,都是是完全为具身智能服务的。”
徐雷本科毕业于中国科学技术大学计算机科学专业,后在美国纽约州立大学法罗分校获得计算机科学博士学位。
毕业后,徐雷在高通工作了3年,后加盟特斯拉,成为特斯拉Autopilot团队核心成员。在特斯拉期间,徐雷从零开始领导搭建Tesla Vision深度学习网络,并用其成功取代了第一代产品中Mobileye的视觉系统,后来Model X搭载的方案,就是徐雷领导研发的。
2016年,徐雷离开特斯拉,与同事特斯拉供应链及产品高级经理宋新雨,在硅谷联合成立了Nullmax,是国内最早获得加州自动驾驶路测牌照的公司之一。
自成立以来,Nullmax坚持以渐进式路线打造无人驾驶。在此过程中,Nullmax先后推出和落地了包括行泊一体在内的高中低配置智驾方案。
徐雷在接受采访时表示,他认为,行业利用不同算力规模的芯片,形成了各种各样的方案,但还没有一家做出能够适配不同芯片,覆盖2TOPS-2000TOPS算力区间的方案。
Nullmax预见,首先,智驾系统肯定会去适配不同的芯片,需要基于功能和性能,选择什么样的芯片方案;其次,不同的方案应对的客户也是不一样的;第三,要回收共用所有数据,让所有数据回来,才能让这套系统变强。
因此,在公司成立的时候,Nullmax就做了一套MaxOS中间件系统,其将多模态输入token化,解耦软件算法、域控和芯片,尽可能地抽象软件层,支持不同算力平台,适配任意传感器,以及不同芯片的域控配置。
目前,Nullmax的商业化落地主要依托1个平台和3个产品方案。1个平台,即中间件平台MaxOS;产品方案根据算力需求和实现能力,可分为以下三种:1V2T,一个摄像头,加上一颗德州仪器的2TOPS算力芯片,实现基础的L2辅助驾驶;5V/6V8T,5/6个摄像头,利用8TOPS算力,实现高速NOA和记忆泊车,且泊车过程可检测障碍物;11V,11个摄像头实现L2+,包括高速NOA和自主代客泊车。
这些高灵活度和高性价比的方案,已为Nullmax赢得了多家知名合作伙伴,包括奇瑞、上汽、长城、比亚迪和福特等主机厂,以及大陆、法雷奥、安波福、经纬恒润和德赛西威等Tier1。

徐雷透露,Nullmax未来的规划主要包含两个方面:一是扩展应用范围,目标将解决方案应用于更广泛的车型中,涵盖不同的芯片平台、计算能力和合作伙伴,以促进技术的普及和多样性;二是提升智驾功能,开发更高阶的智能驾驶功能,提升单车价值并提高Nullmax在市场中的份额。在传统的ADAS方面,Nullmax争取在未来两年左右做到现金流为正。
针对特斯拉FSD即将入华的消息,作为曾经的特斯拉智驾团队核心成员,徐雷表示非常欢迎:“首先,从市场化角度来说,中国是一个很大的市场,不管是合资品牌,包括像特斯拉,都会来中国参与中国本土的竞争,Nullmax肯定不会排斥这种竞争。
其次,从消费者的角度来说,一个好的东西或者一个新的东西进来,对于消费者来说就是多一个选择。第三,我觉得一个高水平的球员肯定要在高水平的联赛中才能培养出来,只有高水平的比赛才能有高水平的球员。
所以只有我们把更多的高水平的方案引进来,才能让这个行业变得更强,这是个毋庸置疑的事情。其实行业的发展速度也取决于它的竞争的激烈程度。”



