
深蓝S07华为乾崑激光版增程车重庆车展上市 限时15.49万起

来源:汽车商业评论(谭薇)2024-04-22 11:40

2024年的新车型中,大热的问界 M9 、新版的极氪001和陷入舆论风暴的智己 L7 都是全系标配激光雷达,市场上对于激光雷达“是否必要”的争论也告一段落,越来越多的消费者开始认同“激光雷达=高阶智驾”的概念,这个曾经与自动驾驶高度绑定的传感器,正在以一种更平易近人的姿态走进千家万户。
与现在汽车工业流水线上的标准件相比,激光雷达早期的产品定位更像是“精准测距的精密仪器”。它的尺寸庞大,工艺复杂,价格昂贵,在研发和制造的过程中几乎不用考虑外观的艺术感与工程的可靠性。诸多自动驾驶公司对激光雷达的早期需求也完全从功能角度出发,用奇形怪状的支架把硕大的激光雷达堆在车顶,以实现360°的测距覆盖范围。
进入21世纪第二个10年,随着激光雷达的应用全面进入乘用车市场,在车规量产的标准约束下,激光雷达的尺寸与外观再也不能像过去那样“野蛮生长”。为了匹配车身的流线型设计与紧凑的可安装空间,激光雷达的产品高度上限被严格定义在 45mm~50mm 以内,同时,作为直接外露视窗壳体的传感器,清洁、加热、抗碎石冲击等附加性的功能需求也都罗列在新的需求清单里。
即便如此,因为选配激光雷达造成的“犄角”外观一直充满争议。虽然消费市场正在像接受 iPhone 的“刘海屏”一样接受汽车的“激光独角”,但就像大家都在期待 iPhone 的“屏下摄像头”方案一样,激光雷达的“舱内方案”也在各个厂商的研发计划里紧锣密鼓地推进着。
从舱外到舱内,是激光雷达产品形态的一次大跃迁。它不仅能够解决长期以来困扰车企和消费者的审美需求,还将在性能、成本和可靠性这三个至关重要的因素上重新定义激光雷达的产品标准。
广义上的舱内方案,是指将现在车顶的激光雷达安装在正下方风挡玻璃后方的位置,与后视镜和前视摄像头集成一体化设计。这种方案往前溯源,其实还有一段关于激光雷达应该如何“上车”的小插曲。
在激光雷达刚刚步入乘用车时代的2021与2022年,对于它安装位置的争论一直未分胜负。以理想汽车为代表的“车顶派”认为,激光雷达安装在车顶“站得高,看得远”,可以获取更广阔的视野范围,不容易受到近距离障碍物的遮挡。以小鹏汽车为代表的“车前派”则表示,车前双侧的安装可以覆盖更多的水平视野,更有利于路面信息的检测,尤其是针对地线边缘以及低矮障碍物等目标。
上述两派言论都有严谨的内在技术逻辑与立场,其中或有冲突,却不耽误双方通过不同的硬件系统方案实现相近的智驾感知功能。但是,随着近两年激光雷达新车型的增多,“车顶派”逐渐成为主流,其背后的原因却与双方早期的论点相去甚远。
原因一:成本。2023年中国车载激光雷达出货量接近60万台,2024年突破100万台也只是时间问题。在激光雷达与智驾体验的关系已经毋庸置疑的时候,迫于降本与内卷的市场压力,大家只能把问题的关注点从“用不用”转移到“用几颗”,在智驾体验比拼没有拉开质的差距之前,车顶1颗激光雷达的方案在成本上要明显优于车前2颗。尤其是激光雷达车型已经下探到15-20万元区间的时候,智驾系统的每一分成本都要精打细算,“4颗以下不要说话”注定成为昙花一现的风景,“只要1个就好”才是当前最经济实用的落地方案。
原因二:盲区。测远能力是衡量智能汽车前向感知的激光雷达的第一核心指标,各个激光雷达厂商在强调新品性能时,无一不是把 200m-300m 的测远能力摆在第一位,因此人们往往会忽视激光雷达的一个系统短板 —— 远与近不可兼得。多数前向激光雷达的感知“甜点区”是在 5m~150m 这个范围,太远了,点云稀疏无法提供高置信度的目标物信息,太近了,120°x25°的视场覆盖能力无法窥见场景的全貌。
同时,激光雷达制造商们也会把自己产品的最小感知范围标注在 0.5m 前后。这是因为目标物越近光反射越强,过强的光反射会带来大量的噪声信息并干扰测距的精度。车前安装的方案看似物理盲区更小,但实际上也要在 0.5m-1m 外的距离才能提供高质量的点云数据,而车顶安装的方案则可以凭借车前盖约1.5m的长度完美掩盖自身的盲区短板,从而更好地满足测远的性能需求。
原因三:可靠性。众所周知,所有传感器的性能都会受到外部恶劣环境的影响,雨雪、雾霾这样的天气条件对安装在车前和车顶的激光雷达可谓是一视同仁,但路面溅起的碎石和泥污就只对车前安装的激光雷达“情有独钟”了。有意思的是,虽然视窗清洁、加热等功能早早写在车企传递给激光雷达厂商的需求里,但实际落地的产品却凤毛麟角,因此激光雷达对外部脏污遮挡的处理能力几乎约等于你的洗车频率。
由于上述三个原因,相比于让2-3颗激光雷达在前方"冲锋陷阵",车企更愿意把它“束之高阁”,从而规避盲区的缺陷以及路面状况可能造成的各种可靠性风险。
然而,“束之高阁”的激光雷达除了是影响整车造型美观的“显眼包”,还有许多不可避免的外部风险,比如一片雨天的落叶,一坨来自鸟类的排泄物…… 总之,在变化万千的大自然有太多“意外”会挑战和影响激光雷达的高精度与高置信度。为了最小化风险,聪明的工程师们研发出了新的产品方案 —— 把激光雷达关进舱内。
图片来源:Seyond▼

2023年的上海车展前夕,禾赛科技发布了国内首款舱内激光雷达 ET25,并强调该产品联合福耀玻璃一起打造,得以实现“性能不受影响”“造型高度仅有 25mm”“工作噪音小于 25dB”,一时掀起了业内对于舱内方案关注的热潮。
其实早在2018年,禾赛ET25的合作者福耀玻璃就已经开始邀请主流的激光雷达公司参与他们的研发项目,测试前风挡玻璃对激光波段的影响和损耗。除了福耀,韦巴斯特也提出过把激光雷达集成到车顶全景天幕里的想法,欧司朗的团队也发表过把激光雷达集成到车灯内的方案……国内外知名 Tier-1 对于激光雷达的集成方案的热情远比我们预期来得早,也更为高涨。
到了2024年CES的舞台上,法雷奥和 AGC 等 Tier-1 和集成商已经开始展示基于舱内方案的 Demo 效果,基于车灯的集成方案也在 Innoviz 的展台上窥见真容。由此可见,“舱内”激光雷达的产品形态并非天马行空的一家之言,而是产业链上下游玩家协同合作多年方才取得的不易成果,我们看到的也许只是冰山一角。
激光雷达走进舱内究竟有哪些优势呢?是什么驱使着整个产业链为此而努力的呢?
优势1:风阻。李想在 MEGA 的新车发布会上浓墨重彩地介绍“公路高铁”造型的由来,为了降低风阻系数,背后的设计与工程团队付出了数不清的努力和汗水。同样,雷军在小米 SU7 的发布会上对整车外观设计和风阻系数也不吝赞美之词。令人好奇的是,如果将两款车型头上凸起的激光雷达换成舱内方案,风阻系数还会再降低多少。按照之前业内分享的信息,车顶有无激光雷达的风阻系数差别大致在 0.01cd 左右,因此造成的高速续航里程差别可能在20km 上下。(无更多实测数据,如有错误烦请指出)
图片来源:禾赛科技▼

优势2:美观。审美是个仁者见仁智者见智的事情,我们很难用一条准绳去定义车型的丑美,但其中还是有些共性可以借鉴的,比如黄金比例的分割要比不规则的分割更具美感,完整的平滑曲线造型要比不规则的凸起造型更具美感,车顶的激光雷达之于整车造型也是如此。在仰望 U8、理想 L9 这样的 SUV 车型上,激光雷达的犄角尚处于可以接受的状态,甚至还有消费者另行购买激光雷达的塑料件去给低配车型“升级”。但是在注重流线造型的轿车与轿跑车型上,我相信隐藏式设计的舱内方案会是更受欢迎的选项。
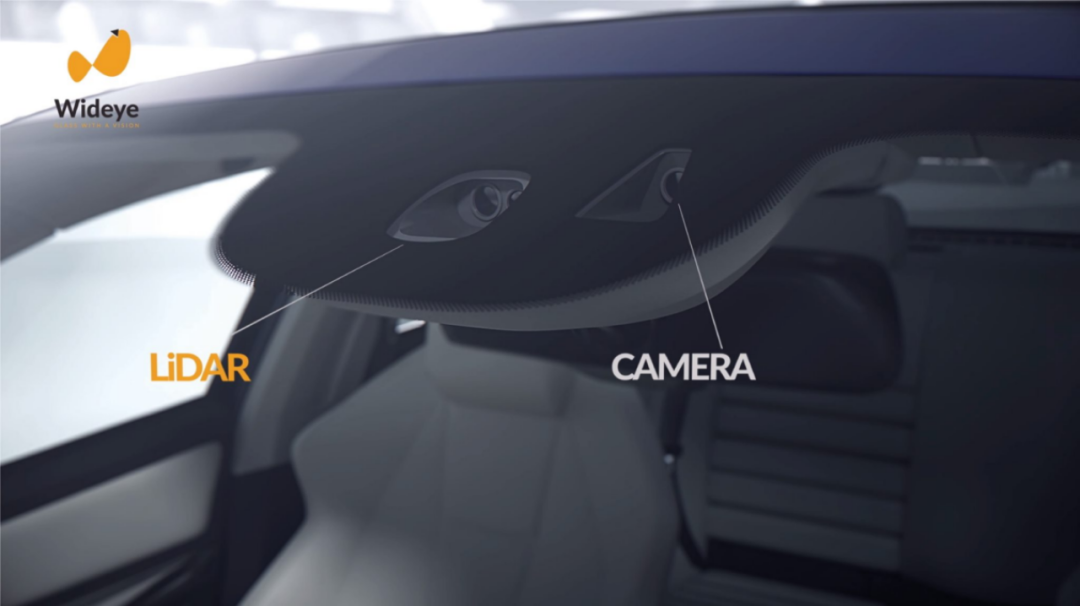
优势3: 集成。在舱内方案的设计中,激光雷达会与主摄像头进行高度一体化的设计,大疆车载也在近期发布了相似的产品模型。这样设计的好处在于它极大地缩减了激光雷达视场与摄像头视场在物理坐标系上的空间误差,降低了融合感知的配准难度,为实现效率更高的前融合和深度融合在硬件层面打下良好的基础。
图片来源:Wideye▼
优势4:可靠性。把激光雷达关进舱内其实是一个追求技术变量“确定性”的过程,因为整个车舱内部的环境因素都是可衡量与可预期的,你不会遇到因为夏日暴晒壳体温度突破90℃的极限情况,你不会遇到任何飞溅的泥污或鸟类排泄物,你再也不需要视窗加热、清洗这些工程成本高却收益甚微的功能。你需要做的只是在这个温度上下限可控,有前挡玻璃替你遮风避雨的环境内安安静静地把感知这一件事做好。
拥有“确定性”总是美好的,但是为此付出的代价必将是一个漫长的过程。

在激光雷达上车伊始,对于技术路线的争吵就不绝于耳。激光波段的 905nm 与 1550nm 之争,扫描方式的转镜扫描与 MEMS 扫描之争,探测器件的 SiPM 与 SPAD 之争,信控层面的 FPGA 与 MCU 之争。现在有些争论已经有了答案,比如降本的大环境下 1550nm 方案已经注定被淘汰出局。也有些争论才刚刚开始,比如 SiPM 和 SPAD 哪个才是探测端的终局选择。还有些争论,可能要因为舱内方案的出现重新掀起波澜,扫描方案就是其中的典型。
在2021和2022年,乘用车激光雷达定点主要集中在禾赛和速腾两家激光雷达公司,他们也分别代表了转镜与 MEMS 两种不同扫描技术路线的差异,业内一度认为手握大量定点的速腾会将 MEMS 定义为扫描路线的终局方案。但是,随着禾赛出货量的攀升,华为、探维等公司新产品的发布,转镜方案逐渐成为业内共识的主流方案。
其实转镜与 MEMS 的争论可以简化为 1D 扫描与 2D 扫描的差异。1D 扫描就是靠转镜的水平扫描覆盖激光雷达所需的水平120° 视场角,竖直方向25°的视场角则需要依靠激光发射与接收的阵列分布来实现。2D 扫描就是在扫描层面完成120°x25°视场的覆盖,对于激光发射与接收的阵列分布空间需求大大缩小。因此在元器件与性能相同的情况下,2D 扫描可以实现更小的产品尺寸,1D 扫描虽然具备更高的可靠性,但是在优化产品的外观尺寸上受限于收发器件的集成度,高度尺寸很难缩小到 40mm 以内。
由此引出了激光雷达进入舱内的第一个代价 —— 尺寸。
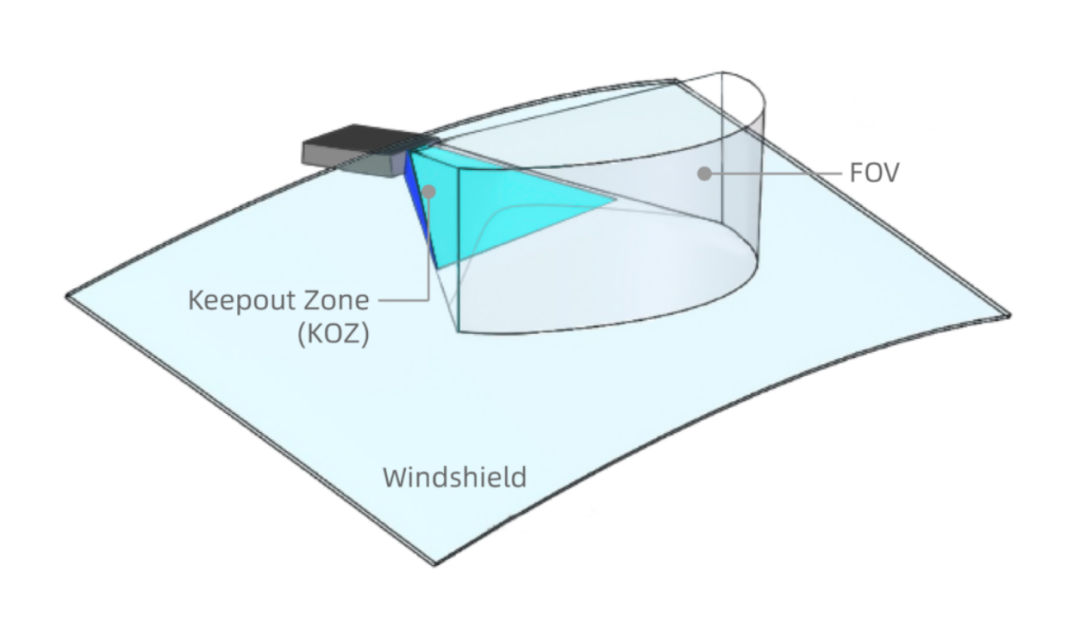
在舱内方案中,所有集成于座舱上方的传感器都需要与挡风玻璃之间留有一定的空间,称为 Keep Out Zone (KOZ)。而传感器的高度尺寸越大,其所需要的 KOZ 也越大,对驾驶员的视野遮挡就会越严重。因此,激光雷达想进入舱内必须优化高度尺寸,比如 25 mm 厚的禾赛 ET25,与 45 mm 厚的其他远距激光雷达相比,其 KOZ 要小一半以上,能够有效降低对驾驶员视野的影响。
图片来源:禾赛科技▼
由此可见,在当前激光雷达收发器件集成条件下,除非大幅降低对激光雷达线数和分辨率的需求,否则 1D 扫描方案的产品想进入舱内难度极大,各个厂商必须寻求扫描方案的突破或收发阵列更高的集成度,才有可能满足舱内方案的尺寸需求。
众所周知,激光雷达作为一个精密的光学传感器,任何干扰激光传播的介质都会影响其感知的性能,舱内方案也不例外。首先,激光雷达厂商必须通过新的光路设计,保证 FOV 在舱内尺寸的限制下不受影响。其次,常规的风挡玻璃的涂层和夹层都会吸收激光雷达常用的 905nm 与 1550nm 等波长的红外光,因此,舱内激光雷达 KOZ 对应的风挡玻璃区域必须减少厚度,并通过特殊涂层提升 905nm 波长的通过率,最大可能降低折射和衰减的现象。
不过,再薄的玻璃、再好的涂层也无法改变物理性质引起的光信号损耗,对此,激光雷达厂商的说法是可以将性能衰减控制在5%以内,而玻璃厂商的口径更加保守,大致是10%-15%之间。
这就是激光雷达进入舱内的第二个代价 —— 性能与成本。
舱内方案会让激光雷达在性能衰减的同时增加整车的成本(更贵的前风挡玻璃与系统方案),这显然与当下"性能更好,成本更低"的诉求背道而驰。研发肯定不想要一个精度和测距都退步的传感器,市场也更愿意把成本花在冰箱、彩电、按摩沙发这些消费者看得见摸得着的座舱体验上,销售也不会愿意指着悬在驾驶员头上的黑盒子介绍"这是我们最新研制的传感器造型"……
由此可见激光雷达的舱内方案在解决性能与成本的关键问题之前很难普及,这也是禾赛等厂商把舱内产品的交付节点都放在2025、2026年之后的原因。
除此之外,舱内方案还有诸如 NVH、电磁干扰之类的工程问题需要在量产交付的过程中进行验证和解决,就像 iPhone 迟迟没有推出屏下摄像头一样,短期内我们依然要为功能实现的完善程度进行设计上的妥协。
图片来源:大疆车载▼

尾声:激光雷达的"量变"与"质变"
CES2024上,禾赛科技推出了 AT512,速腾聚创发布了 M3,法雷奥和 Innoviz 等海外厂商也展示了高性能的车载新品。在出货量节节攀升,看似一片大好的市场节点上,激光雷达的产品演进路线其实已经遇到了瓶颈。
与摄像头只需要一片 CMOS 进行感光像素的提升相比,激光雷达成像需要同时处理发射、扫描和探测三个环节,想在性能大幅跃迁的同时控制好产品的尺寸、成本和功耗是一件短周期内不可能完成的任务。当然,我们可以寄望探测端的器件升级大大降低性能提升的硬件壁垒,但是目前手握核心器件话语权的依然是海外大厂,这样无异于将现下积累的行业优势再度拱手让人。
更糟糕的是,当下竞争白热化的智驾市场并没有留给激光雷达多少自证价值的空间,降本交付提升市占率是远比提升性能更为现实和重要的任务。尤其是从融合感知的角度来看,激光雷达单纯线数与测远能力的提升在整体智驾方案中的边际效益逐渐降低,"量变"并非工程师们对点云的核心诉求,"质变"才是他们更愿意尝试和探索的新领域。
给激光雷达赋予速度信息是产品性能上的质变,这也是 FMCW 虽然距离落地尚远,但车企都愿意布局并尝试的原因。造一台激光摄像机是产品功能上的质变,天然附着 RGB 信息的点云或具备高精度测距信息的图像,它可以提供每一位感知算法工程师梦寐以求的原始数据。然而,对最重要的市场终端用户而言,把激光雷达关进舱内是产品形态层面的质变与跃迁,只要时机把握得当,它可以重新引领产品与系统的话语权。
整个激光雷达行业正处在瓶颈的关口,这个关口在降本的压力下直径越缩越小,只有少数玩家可以在剩余不多的时间里冲过它,完成阶段的蜕变,优胜劣汰的游戏换了一个又一个赛道重复上演。不过幸运的是,一旦我们来到瓶颈的另一端,就有能力与资格去描绘更具创造性与技术美感的未来蓝图。



