星光730尊享型上市:7大核心升级,综合补贴价8.78万元起

来源:汽车商业评论(周洲)2023-11-10 10:00

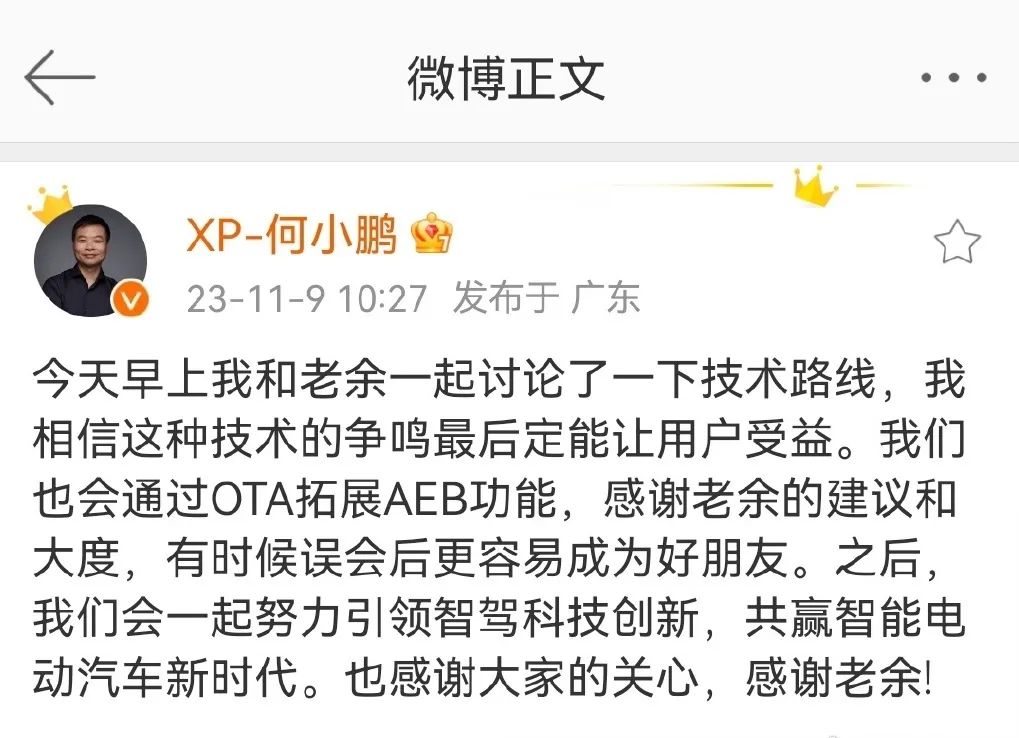
11月9日上午,何小鹏发了文,称和余承东讨论了技术路线,“我们也会通过OTA拓展AEB功能,感谢老余的建议和大度,有时候误会后更容易成为好朋友”,为这场AEB之争划下句点。
这两日挑惹起“何余之争”的AEB(Automatic Emergency Braking,自动紧急刹车系统),引得诸多大佬们下场来科普什么是AEB,也有异常积极的自媒体连夜测试华为参与车型和小鹏的AEB,结果显示,小鹏 G6 和小鹏 G9 两款车的测试成绩不及搭载华为 ADS 2.0 系统的问界 M5 和阿维塔 11。
定位于“全球专家评选中国年度汽车”的轩辕奖测试团队认为,测试不等于体验,AEB的测试场景比较窄化,其实远远不能覆盖现实中复杂路况和场景,但也通过实测表明,问界M7的AEB其实已经不是传统意义上的AEB了,它现在的能力已经远远超出当初被制定的标准。
汽车商业评论和轩辕奖现场测试团队跳出“何余之争”,聊了聊作为欧美强制标准的AEB,它的存在对消费者来说现状和体验是什么样的,随着技术的迭代、智能驾驶逐渐向高阶演进,未来它的终局又是什么。
华为深度参与的问界M7、极狐阿尔法S全新HI版、阿维塔11,还有这两日对线AEB的小鹏G9,均在第十届轩辕奖评选出的十佳汽车之列。(参看《2023第十届轩辕奖揭晓》)
值得留意的是,在第十届轩辕奖的测评中,极狐阿尔法S全新HI版和阿维塔11就已经具备识别到锥桶自动执行变道的能力。

第十一届轩辕奖针对入围的40强车型的年度专业测评正在持续进行中,涵盖车辆动静态、座舱生态和智能交互测评、智能驾驶体验测评、场景体验测评四大维度的专业测试。
轩辕奖现场测试团队认为,车辆的智能驾驶功能在更多感知硬件、更好的算法和AI大模型的学习能力加持之后,遇到静态或者动态障碍,不需要触发AEB,在条件允许的情况下可以执行变道或者提前减速,不必急停刹车。随着车辆智能化设备的升级,AEB的能力也升级了,并且将逐渐融合到智能驾驶功能中去。
当智能驾驶的算法不断优化和进阶,让驾驶越来越能够学习以人为主的主动防御,AEB融进智能驾驶中,届时AEB的终局可能是再也没有AEB的概念了。
AEB是汽车工业史上最早开发的辅助驾驶功能之一,是指汽车检测危险或检测驾驶员在危险情况下缺乏响应能力时,在这种情况下,汽车将自动实施制动,即使不能避免碰撞风险,也能将碰撞风险程度降到最低。
这可能发生在停车、变道或前向碰撞检测(包括行人等)期间。有时AEB也称为前向碰撞感应。
11月7日根据某自媒体的测试,在 “夜间AEB对静态假车” 测试中,问界M5和阿维塔11均做到时速 80km/h 可刹停,小鹏的两款车做到时速 40km/h 可刹停;在 “夜间AEB对静态两轮电动车” 测试中,问界M5和阿维塔11均做到时速60km/h可刹停,小鹏G6做到时速30km/h可刹停,小鹏G9则未通过测试。
轩辕奖现场测试团队认为,测试不等于体验。
根据轩辕奖现场测试团队的科普,AEB主要由传感器、控制模块(ECU)、制动模块三部分组成。传感器是AEB系统的关键组成部分,包括单/双目摄像头、红外摄像头、毫米波雷达、超声波雷达、激光雷达等。
主机厂主要采用单雷达、单视觉以及视觉+雷达三种类型方案。近年来,视觉+雷达的融合方案,越来越多的被主机厂采纳,市场份额已经接近80%。
AEB被认为是ADAS中最基础的功能,该系统通过摄像头或者雷达检测和识别前方车辆/行人,如果车辆/行人的实际距离小于设定的安全距离,即使驾驶员没有任何反应,系统也会主动刹车。如果实际距离大于或等于安全距离,系统则可能采用视觉、听觉等方式向驾驶员报警。
AEB很像是在学车时,守护在身旁的那位高度警觉的教练。
此前,欧盟NCAP(New Car Assessment Program,新车评价规程)通过对交通事故的分析发现,90%的交通事故是由于驾驶者的注意力不集中引发的,而AEB系统则可有效避免或减少事故的发生。
2015年5月,作为第三方独立车辆安全认证机构,欧盟NCAP和澳大利亚ANCAP共同发表了一份关于AEB在现实世界追尾碰撞中的有效性的研究报告,结果显示AEB技术能在现实世界中减少38%的追尾碰撞,且限速60km/h的城市道路与郊区道路效果无明显差别。
早在2012年,欧盟就出台规定,要求2014年生产的新车必须配备AEB系统。2014年年初,欧盟NCAP正式将AEB纳入评分体系,没有配备AEB系统的车型将很难获得5星级评价。自2015年11月1日始,欧洲新生产的商用车也开始强制安装LDW(车道偏离警告)和AEB系统。
今年5月31日,美国国家公路交通安全管理局(NHTSA)发布一项拟议新规,要求几乎所有乘用车(车辆总重低于4536公斤)在最终规则发布后的3年内必须安装AEB系统,以解决交通死亡和严重的伤害危机。该拟议法规规定,AEB系统必须能让车辆在100km/h时速下进行制动。此外,日间和夜间的行人紧急制动也被纳入新规之中。
根据NHTSA估算,如果这项法规得到落实,每年将至少挽救360条生命,并使每年交通事故导致的意外受伤人数至少减少24000人。
在中国,AEB并非强制性选项。2022年,原工信部部长苗圩和理想汽车创始人李想曾公开呼吁将AEB这一成熟技术列为新车标配功能。
车企们在营销时,常以突破速度极限作为AEB的重要指标。在不久前的问界M7发布会上,其AEB最高刹停时速提升至90km/h。特斯拉、蔚来、理想等车企在限定范围内都称AEB有效速度超过100km/h以上。
不过,雷达汽车CEO凌世权在微信朋友圈表示:“行业里AEB避免碰撞的最高刹停速度范围是50km/h—60km/h,特斯拉Model Y目前实测数据是50km/h。”
实际场景中,AEB一般是在低速前向制动的少部分场景发生作用。例如,关于AEB的测试基本都偏向于低速场景,美国IIHS只在20km/h和40km/h速度下对AEB系统进行评价;中国C-NCAP则是30km/h和50km/h两个速度。
在这场AEB大混战的吃瓜围观中,有车主戏称:“30km/h的速度都这么慢了还不会刹车还需要AEB,这还开啥车啊。”
在低速行驶时,正常的司机都会自己判断刹车。
在高速场景时,车主们一般不会启动AEB。这是因为,系统在车辆距离目标物远处就要开始刹车,但在高速行驶时,制动距离的变化极大,比如相邻车道的物体、区分车辆和行人等,系统会对周边状况产生误判,高速急刹车对驾驶员以及后面车辆都可能产生连环伤害。这正是AEB的体验痛点。
另一个AEB的使用痛点是:静态物体识别。雷达擅长探测移动中的物体,对于静态物体的识别准确性有时很尴尬,比如将静止车辆识别为危险物,出现误报,导致异常碰撞,对驾驶者造成伤害。
此外,测试AEB的场景单一有限,无法覆盖现实中五花八门的交通状况,例如对着“弱势道路使用者”之一——横冲直撞的外卖小哥,AEB很难做到完美刹车避开剐蹭,总是有那么一点来不及。


轩辕奖现场测试团队总结后认为,何余二人其实聊的是两回事。
在这场吃瓜围观中,很多人混淆了自动辅助和智能/自动驾驶的定义。
余承东强调的是,问界新M7的AEB系统可以在90km/h的速度下进行触发刹停,而传统AEB系统的刹停速度通常只能达到50km/h。何小鹏更倾向于将AEB系统朝着“静态AEB”的方向发展,即通过主动避障而不是刹停来保护用户的车辆安全。


这是两套产品方向和逻辑。
在同济大学博士生导师、汽车安全技术研究所所长朱西产看来,AEB和智能驾驶(NOA/NGP/NOP)是两套算法、两回事,AEB算法是用经验做的,AEB做得好说明研发中心的经验很好;自动驾驶(智能驾驶)做得好,说明这个公司的数据闭环、AI模型做好了。有的公司有很好的AI团队,它可以做出很好的NOA、NOP甚至L3的自动驾驶,但是不一定有好的AEB,有的公司有非常好的AEB,但它没有AI能力的话,不一定能做好自动驾驶。
所以自动驾驶好不一定AEB好,AEB好不一定自动驾驶好。同时他也认为,在CNCAP与ENCAP中拿双五星,可以证明AEB做得很好。
轩辕奖测试团队认为,现在的AEB能力和早期分布式EE架构下的系统相比,已经有了大大升级和丰富,覆盖的场景会越来越多。但AEB是底线,很像规定动作,不能将这个备用系统作为避免碰撞的主要手段。
如果更多的人爱看AEB比赛并且只以“能刹住”作为唯一评价标准,未免有些片面。
轩辕奖测试团队研判觉得,在智能驾驶时代,随着域控架构越来越集中,舱驾一体的趋势正在涌动,AEB也许有新的深耕方向,也许会被智能驾驶的感知能力重新赋能,也许会消融在强大的智能驾驶功能中,成为一个历史概念。

根据安森美(onsemi)高级首席方案市场营销工程师丹·克莱门特(Dan Clement)撰写的《汽车ADAS进化的百年历史》,AEB的起源可追溯到美国无线电公司(RCA)一位名叫纳森尼尔·考曼(Nathaniel Korman)的工程师,他在二战期间参与研发了雷达系统。
战后,RCA想要开发民用市场,考曼将雷达系统的速度控制研究,最初放在火车系统减少路口的交通流量上。后来他指出,道路汽车也可以使用这种系统。
考曼在一项于1948年提交并于1955年获批的专利中对此系统进行了描述:“该发明利用一个雷达系统,此系统搭载在要控制的汽车上。雷达系统会根据与前车的距离产生一个电压。将该电压与依赖于汽车行驶速度的电压进行比较;根据比较结果对汽车进行控制。”
住在密歇根湖畔的乔治·拉什德(George Rashid)发明了第一个汽车雷达控制制动系统。密歇根湖畔时常大雾弥漫,引发交通事故和险情,这激发了拉什德的发明欲望。
但拉什德发明的雷达控制制动系统由于真空管笨重庞大以及对其可靠性的质疑,使得这套系统难以商业化。
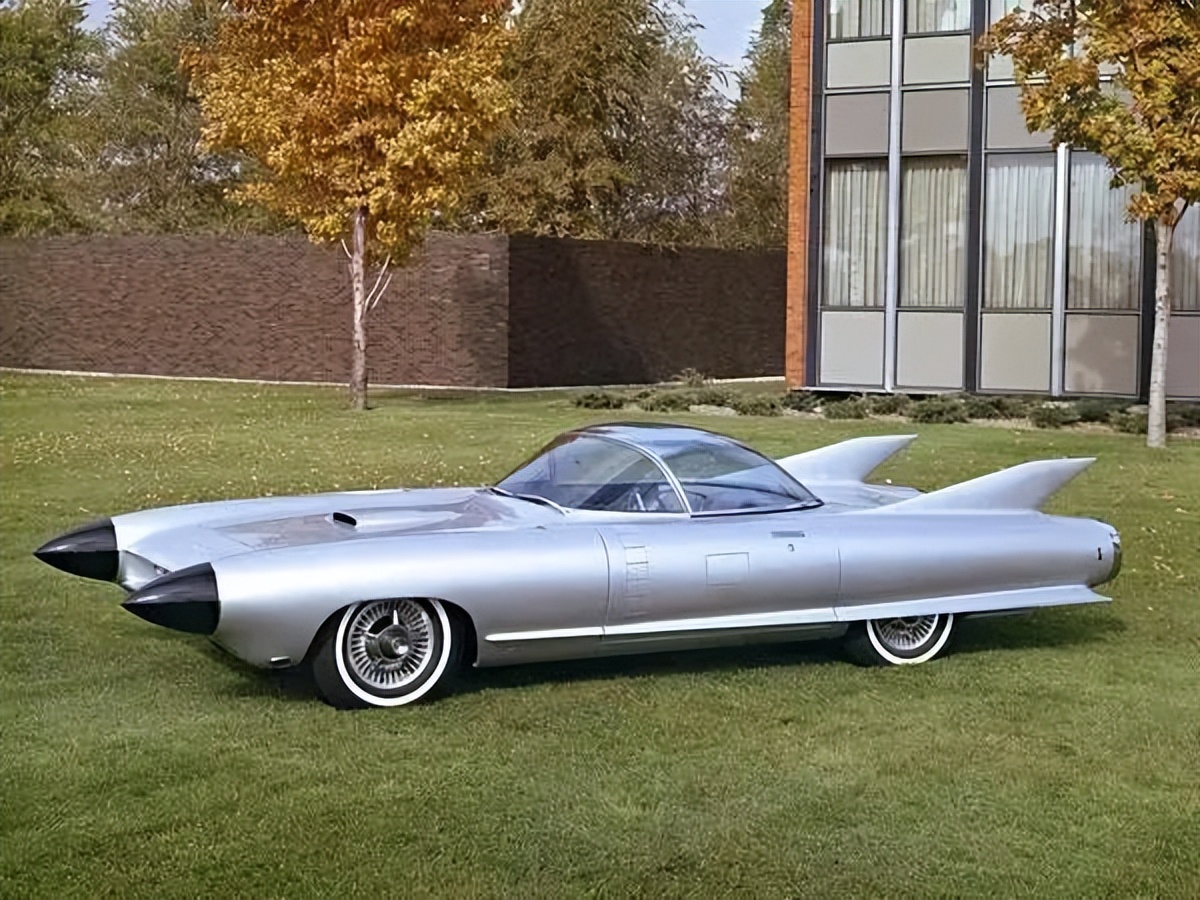
不过,许多车企参考了拉什德的专利。1959年,凯迪拉克旋风(Cadillac Cyclone)概念车上推出的自动防撞系统,被认为是AEB的初始模态,设计者为哈利·厄尔(Harley Earl)和比尔·米切尔(Bill Mitchell)。
20世纪70年代,随着晶体管和集成电路的商业化和小型化,越来越多的公司开始设计各种类型的防撞系统。
彼时,工程师和监管机构就非常担心驾驶员会因过度依赖这些系统,可能会导致更多事故,而不是减少事故。他们在测试中观察到了这种行为。
美国国家公路交通安全管理局(NHTSA)建议,至少要到20世纪80年代,这些系统才会足够安全。
AEB的商业化出现在2003年,各大车企陆续推出自己研发的AEB,叫法各不相同。
第四代本田英诗派所搭配的碰撞缓解制动系统(Collision Mitigation Braking System,CMBS)成为第一款面向消费者的AEB。同年,奔驰S级轿车也推出了自己版本的AEB系统PRE-SAFE®。丰田、奔驰、沃尔沃等车企都研发了AEB系统。