放不出去款,也收不回车

来源:汽车商业评论(张鸥)2022-08-01 14:26
来源:unite.ai
作者:Alex Vakulov

要实现车辆自动驾驶,需要的不仅仅是简单的人工智能。
一辆自动驾驶汽车从各种来源接收数据,如声纳、照相机、雷达、GPS和激光雷达,从而能够在任何环境中进行导航。来自这些设备的信息应该被快速处理,很显然,数据量十分庞大。
来自传感器的信息不仅由汽车的计算机实时处理,一些数据会被发送到外围的数据中心进行进一步分析。然后,通过一个复杂的层次结构,它被重定向到各种云端。
车辆被赋予的人工智能至关重要,车载计算机、外围服务器和云的处理能力,汽车发送和接收数据的速度同样需要重视。
即使是普通的汽车,只要有司机在驾驶,就会产生越来越多的数据。自动驾驶汽车每小时可以产生大约1TB的数据。如此巨大的数据量正是大规模采用自动驾驶的障碍之一。
自动驾驶汽车的所有数据不能在云端或外围数据中心处理,因为这将带来太多的延迟。即使是100毫秒的延迟,也会在乘客或行人的生死之间造成差异。汽车必须尽可能快地对新出现的情况作出反应。
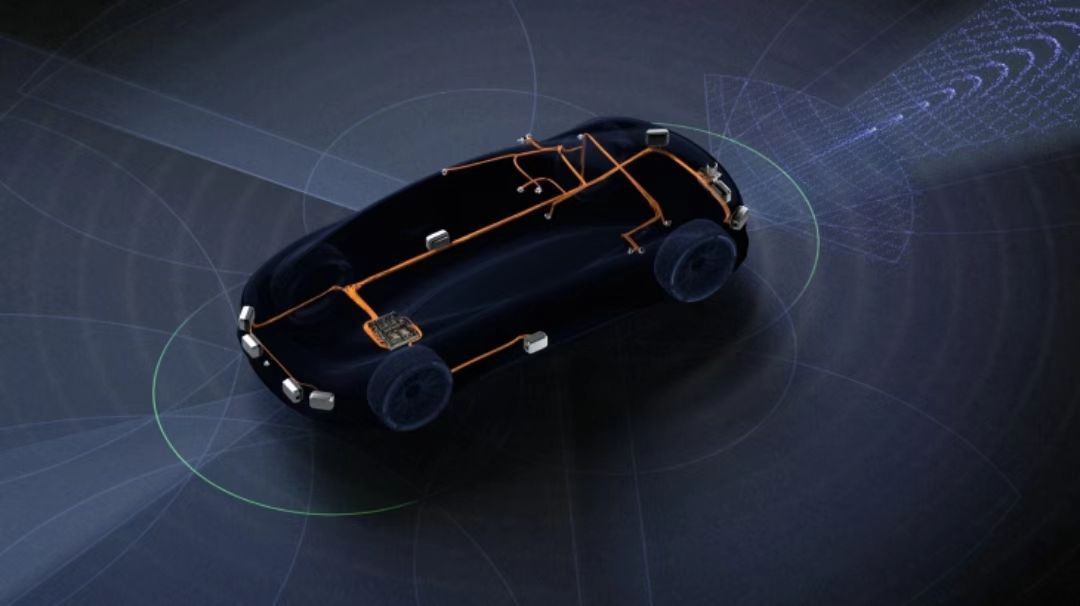
为了减少接收信息和响应信息之间的延迟,部分信息由车载计算机进行分析。例如,新的Jeep车型配备了具有25-50个处理核心的车载计算机,为巡航控制、盲点监测、障碍物警告、自动刹车等服务。车辆节点通过内部网络相互通信。
如果我们把车载计算机视为网络的外围节点,它也符合外围计算的概念。因此,无人车构成了一个复杂的混合网络,它结合了集中式数据中心、云和许多外围节点。后者不仅位于汽车中,而且还位于交通灯、控制站、充电站等。
车外的这种服务器和数据中心为自动驾驶提供所有可能的帮助。它们使汽车能够“看到”其传感器范围以外的东西,协调道路网络上的负载,并帮助做出最佳决策。
GPS和计算机视觉算法(Computer vision algorithms)为自动驾驶汽车提供了关于位置和周边环境的信息。然而,计算环境的范围在不断扩大,一辆车却只能收集到有限的信息量,因此,为了更好地分析驾驶条件,数据交换十分必要。
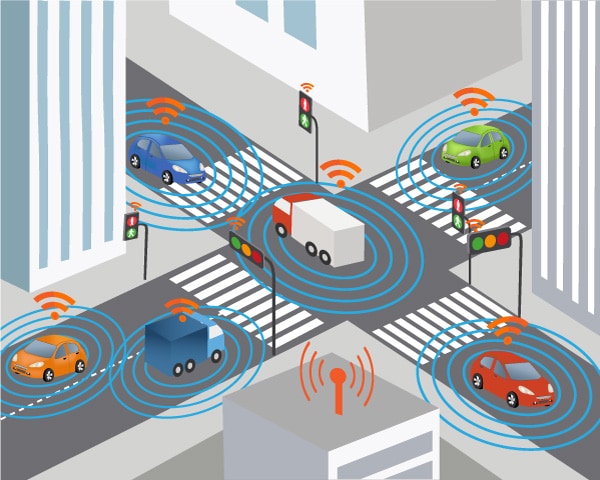
车对车(V2V)通信系统依赖于同一地理区域内车辆创建的网状网络。V2V被用来交换信息并向其他车辆发送信号,如距离警告。
V2V网络可以扩展到与交通基础设施(如交通灯)共享信息,即V2I(车辆到基础设施)。
在美国,联邦公路管理局(FHWA)定期发布各种V2I指南和报告,以帮助改善该技术。V2I的好处远远超出安全范围提醒,除了提高安全性外,V2I在移动性和与环境的互动方面也有优势。
每天走同样路线的司机会记住路上所有的坑洞。自动驾驶汽车也在不断学习。它会把有用信息上传到外围的数据中心,例如,集成到充电站。
充电站将依靠人工智能算法,帮助分析从汽车收到的数据并提供可能的解决方案。通过云,这些数据被传送到共同网络中的其他无人驾驶车辆。
如果这种所有自动驾驶汽车之间的数据交换模式在几年后真正实现,那么我们可以预计每天会有艾字节(exabytes:数百万兆字节)的数据。根据各种估计,届时道路上可能会出现几十万到几千万辆自动驾驶汽车。
如上所述,自动驾驶汽车不仅可以从传感器接收有关行人和骑自行车者的信息,还可以与其他汽车、交通灯和其他城市基础设施交换数据。
目前已经有几个5G联网汽车项目。汽车使用移动运营商的5G网络和C-V2X(Cellular Vehicle-to-Everything)技术,与其他汽车、骑自行车的人,甚至交通灯进行通信。
交通灯配备了热成像仪,可以检测到接近十字路口的行人,汽车的仪表板上便会出现警告。连接的骑自行车的人也会被告知位置,防止出现危险情况。在能见度低的情况下,停放的汽车会自动打开紧急闪光灯,通知所有接近的汽车他们的位置。
5G移动网络在这里派上了用场。它们提供极快的速度,非常低的延迟,以及支持大量同时连接的能力。没有这种数据处理能力的自动驾驶汽车将无法比人更快地完成许多任务。
宝马、戴姆勒、现代、福特和丰田等主要汽车制造商已经在将5G技术融入他们的产品。网络运营商也花费了数十亿美元来建设5G网络。因此,现在正是双方协同合作的合适时机。
然而,除非5G基础设施到位,否则所有与5G连接的自动驾驶汽车的实验都将陷入停滞。
并非所有的数据类型都需要快速处理,而且车载计算机的性能和存储能力有限。因此,可以 “稍作等待”的数据应该在外围的数据中心积累和分析,而一些数据将迁移到云端,在那里进行处理。
城市政府和汽车制造商有责任采集、处理、传输、保护和分析每一辆车、交通堵塞、行人或坑洞的数据。一些智慧城市的建筑师已经在尝试使用机器学习(machine learning)算法,更有效地分析交通数据,以快速识别道路上的坑洞,调节交通,并即时应对事故。
为了将完全自主驾驶引入我们的生活,有必要解决处理和存储海量数据的问题。每天,仅仅一辆无人驾驶汽车便可以产生多达20TB的数据。要应对未来的艾字节数据,我们需要一个高性能、灵活、安全和可靠的边缘基础设施。还有一个问题是高效的数据处理。
为了让车载计算机做出实时决策,它需要关于环境的最新信息。旧的数据,如一小时前的汽车位置和速度信息,通常不再需要了。然而,这些数据对于进一步改进自动驾驶算法是很有用的。
人工智能系统的开发者必须接收大量的数据,以训练深度学习网络:通过摄像头、激光雷达信息识别物体及其运动,并将环境和基础设施的信息优化组合,以做出决策。对于道路安全专家来说,汽车在道路上发生事故或危险情况之前即时收集的数据是至关重要的。
随着数据被自动驾驶汽车收集并转移到外围数据中心,之后迁移到云存储,使用优化和分层数据存储架构的问题便出现了。新鲜的数据必须立即进行分析,以改善机器学习模型。这里需要高吞吐量和低延时。支持多驱动器技术的固态硬盘和大容量HAMR驱动器最适合这一任务。
在数据通过初始分析阶段后,必须更有效地存储:在高容量但低成本的传统近线存储(nearline storage)上。如果未来可能需要这些数据,这些存储服务器就很适合。不太可能被需要,但由于其他原因必须保留的旧数据,可以转移到归档级别。
数据将越来越多地在边缘得到处理和分析,迎来工业4.0时代,这正在改变我们使用数据的方式。
边缘计算(edge computing)将使数据在靠近收集的地方得到处理,而不是传统的云服务器,使分析速度更快,尽可能立即对变化的情况作出反应。汽车和外围数据中心之间的高速信息交流网络将有助于使自动驾驶更安全、更可靠。

以上所有关键点充分说明了数据在自动驾驶领域的重要性。
无人驾驶汽车的大规模采用涉及到大量数据的收集,这些数据不仅要由车载计算机处理,还要由边缘服务器和云端处理。数据处理基础设施应做好一切准备。
随着5G的普及,自动驾驶汽车将开始产生越来越多的数据,然后分析和使用这些数据,使智能城市成为现实。实现这一目标不会很容易,但最终,我们将有可能开启一个新的篇章。