送了八年货,现在改送人

来源:汽车商业评论(张鸥)2022-11-01 16:53
来源:福布斯
作者:Brad Templeton

作为近些年埃隆·马斯克(Elon Musk)公司最重要的项目负责人,特斯拉的前AI主管安德烈·卡帕斯(Andrej Karpathy)自2022年7月突然宣布离职后,他一直是业内最引人好奇的话题之一。
卡帕斯在特斯拉的五年任期是该公司人工智能发展的关键时期。10月,他做客计算机科学家莱克斯·弗里德曼(Lex Fridman)的播客,概述了特斯拉从汽车中移除雷达和超声波的原因。

卡帕斯的主要观点:
额外的传感器给系统增加了成本,更重要的是增加了复杂性。它们使软件任务更加困难,增加了所有数据管道的成本;给供应链和制造业增加了风险和复杂性。
马斯克推崇“最好的部件是没有部件”的理念。这样的极简主义可以在整个汽车中看到,比如通过触摸屏处理所有事情。
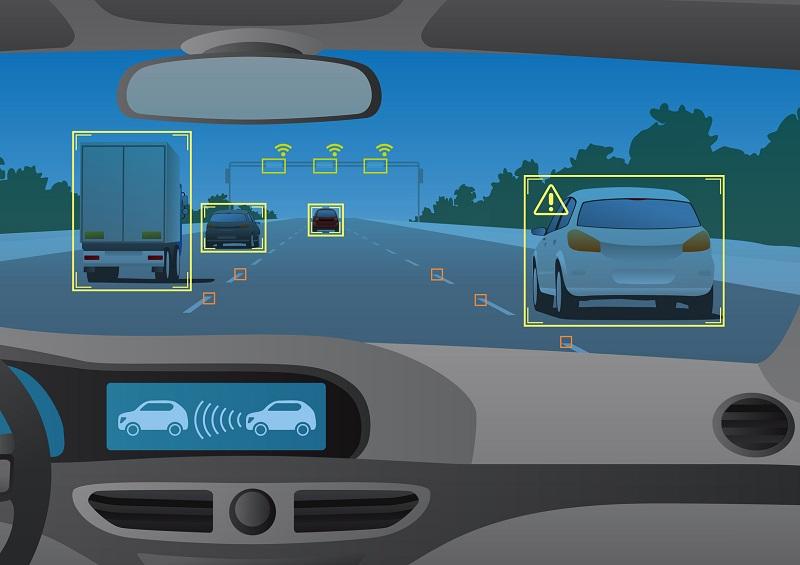
视觉系统(Tesla Vision)是完成任务的必要条件(这一点几乎所有人都同意),也应该是充分条件。如果它已经足够了,额外的传感器和工具成本就盖过了它们所能带来的帮助。
传感器随着零件的变化或可用或不可用。它们必须得到维护,软件必须适应这些变化。它们还必须被校准,以使融合正常工作。
拥有一支收集更多数据的车队比拥有更多的传感器更重要。
必须处理激光雷达和雷达产生的大量代码膨胀和数据膨胀。他预测,其他公司也会很快放弃这些传感器。
绘制地图并保持更新是非常昂贵的。这种方式无法带来根本性突破,你需要专注于视觉系统,这才是最重要的。道路设计是用视觉来诠释的。

亚马逊自动驾驶汽车部门Zoox的CEO和联合创始人杰西·莱文森(Jesse Levinson)在采访中表示,他同意“拥有更多的传感器会带来更多的工作和更多的噪声”,但这些问题并不是难以解决的,而且是值得的。
他认为,你需要正确地进行传感器融合,保证来自传感器的新数据和矛盾数据(contradictory data)不会成为缺点。虽然每个输入都有噪声,但如果你做得好,你可以从中提取真正的信号,达成目标。
一般来讲,其他团队不一定会反对卡帕斯的大部分观点。拥有多个传感器和融合确实增加了复杂性和成本。许多人甚至会同意,在未来的某一天,视觉系统可能已经足够了,其他的传感器都不在需要了。然而,所有人(可能也包括卡帕斯和马斯克)都会同意,在当今的发展阶段,视觉仍然是不够的。
卡帕斯和其他许多人指出,人类主要用视觉来驾驶,所以这显然是可能的。但现实是,计算机没有人类大脑在这方面的能力。很少有技术能像人的大脑一样工作——鸟类用拍打翅膀飞行并不意味着飞机设计师也可以遵循这一路线。
特斯拉的做法在人工智能领域相当罕见。它故意将一个系统限制在“人类传感器”的能力范围内,并希望与人类大脑相匹配,与这些受限的系统合作。
这种观点的差异部分本质在于,特斯拉是一家汽车制造商。
他们的目标是使他们的系统适用于他们已经发货的汽车,或者最坏的情况是对他们已经发货的汽车进行小规模改装。(这种改造已经在进行中,旧车的车主已经看到了主处理器的升级,以及摄像头的更换——据说会有新的摄像头系统)。
汽车制造商非常、非常注重成本。他们在车辆上增加的所有东西都有可能对车辆定价产生影响。在这种情况下,拆卸零件的理念其实是有意义,尽管许多司机抱怨他们有时候做得有点过分。
但是,如果你要移除一个部件,没有这个部件的话系统就无法运作,这就有问题了。特斯拉在2021年取消毫米波雷达后,降低了Autopilot的一些性能,2022年都要过完了,它还没有恢复到此前所能达到的速度。许多特斯拉车主抱怨说,没有雷达的系统更频繁地出现 “幻影刹车”事件,车辆会因为不存在或没有安全威胁的障碍物而刹车,有时甚至是猛刹车。

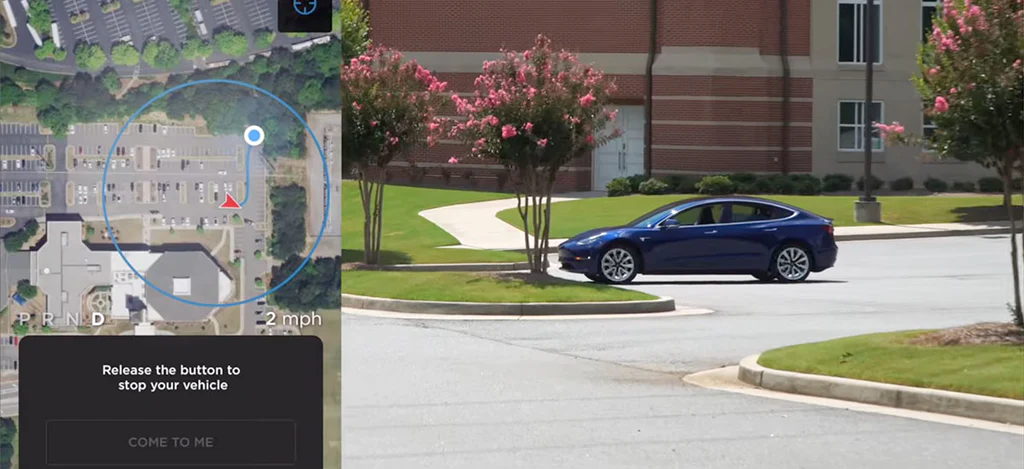
特斯拉没有安装超声波系统的新车已经取消了超声波系统的几乎所有功能,如停车辅助、自动泊车、召唤等。该公司承诺这些功能将在不久的将来回归。
大多数自动驾驶团队认为,通往可部署的自动驾驶的最短路径是使用超声波雷达、毫米波雷达,在某些情况下还有其他传感器。他们认为这是最短和最安全的路径,尽管不是最容易、最低成本的选择。
成本是一个问题,开发速度是更大的因素。今天,激光雷达能够对大类障碍物进行了完全可靠的探测,可靠程度可以让人赌上性命。摄像头则不然,虽然它们未来有可能做到,但没有人知道这个未来何时到来。
研发时间的不确定性也在影响着软件的复杂性。专注提高摄像头的能力也意味着更多的投入——还没有人能够做到。
今天,大多数人都没有考虑到这可能会使未来的系统变得更简单,领先的团队都在投资数十亿美元,接受额外的复杂成本。很显然,一个理论上更简单但还不能实现的解决方案并不比一个更复杂但可操作的解决方案要好。
当然,其他自动驾驶团队都没有进行生产部署,尽管有几个试点项目在复杂的城市中运行。
地图的功用是特斯拉和其他团队意见相左的另一个问题。
几乎每个自动驾驶汽车团队都会利用预先计算好的地图,结合他们的传感器所看到的东西,帮助他们了解道路,并在道路上正确、安全地行驶。特斯拉是一个罕见的例外,它表示不依赖高精地图,要靠人工智能算法和视觉系统来在行驶时实时建立地图。
讽刺的是卡帕斯关于车队价值的说法。他认为,如果一个人有一个大型车队,就有可能建立完整的、详细的、整个世界的地图,并保持及时更新,把这些车队收集的有用信息丢掉真的很愚蠢。
卡帕斯的预测可能是对的,视觉系统或许能够最终取得成功,特斯拉能够如愿摆脱雷达,减少成本。
还有一种情况是,随着时间的推移和所有工具的完善,额外的传感器可能不再需要多花钱了,也不会增加那么多的复杂性了。超声波雷达、毫米波雷达和热像仪能够提供超人的感应能力,它们可以检测到摄像头无法检测到的东西。即使这种优势减少,也不会下降到零——争论的焦点最终依旧是成本的合理性。
特斯拉在做一个很大的赌注——要么获得高回报,要么面临落后的风险。当然,幸运的是这家公司拥有众多的资源和实力,即使内部研究失败,它也有能力转换方向。
对于大家纷纷猜测的他个人的去向问题,他谈及在特斯拉的日子:“随着时间的推移,我有点让自己进入了一个管理角色。我的大部分日子都是开会和发展组织,对团队的高级战略决策做出决定。”
显然,更多的管理职位使他与AI技术性工作渐行渐远。根据他的采访,听起来他可能有兴趣回到特斯拉,从事特斯拉人形机器人Optimus的研发工作。马斯克则迅速做出了反应,在Twitter上回复到:“特斯拉永远欢迎安德烈。”